1. Overview
A mechanical sweeper designed to automatically collect, evaluate, and arrange badminton shuttlecocks using a wheel-driven conveyor system and optical sensors.
2. Problem
Manually collecting and sorting damaged shuttlecocks after badminton practice is inefficient, time-consuming, and physically demanding.
3. Mechanical Design
Engineered a wheel-powered conveyor belt system with brush-type propellers to sweep and lift shuttlecocks without requiring an external power source for mobility.
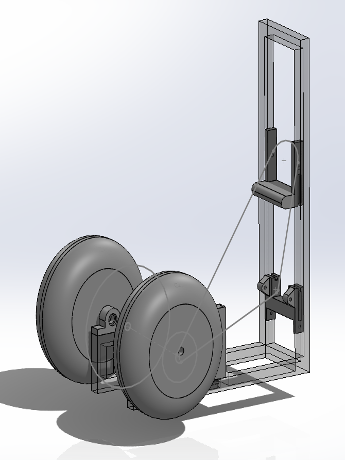
Fig 1. CAD assembly of the sweeping mechanism.
4. Smart Classification
Developed an Arduino-controlled sorting module utilizing 16 IR light sensors to evaluate the structural integrity of shuttlecock feathers, automatically separating damaged units from reusable ones.
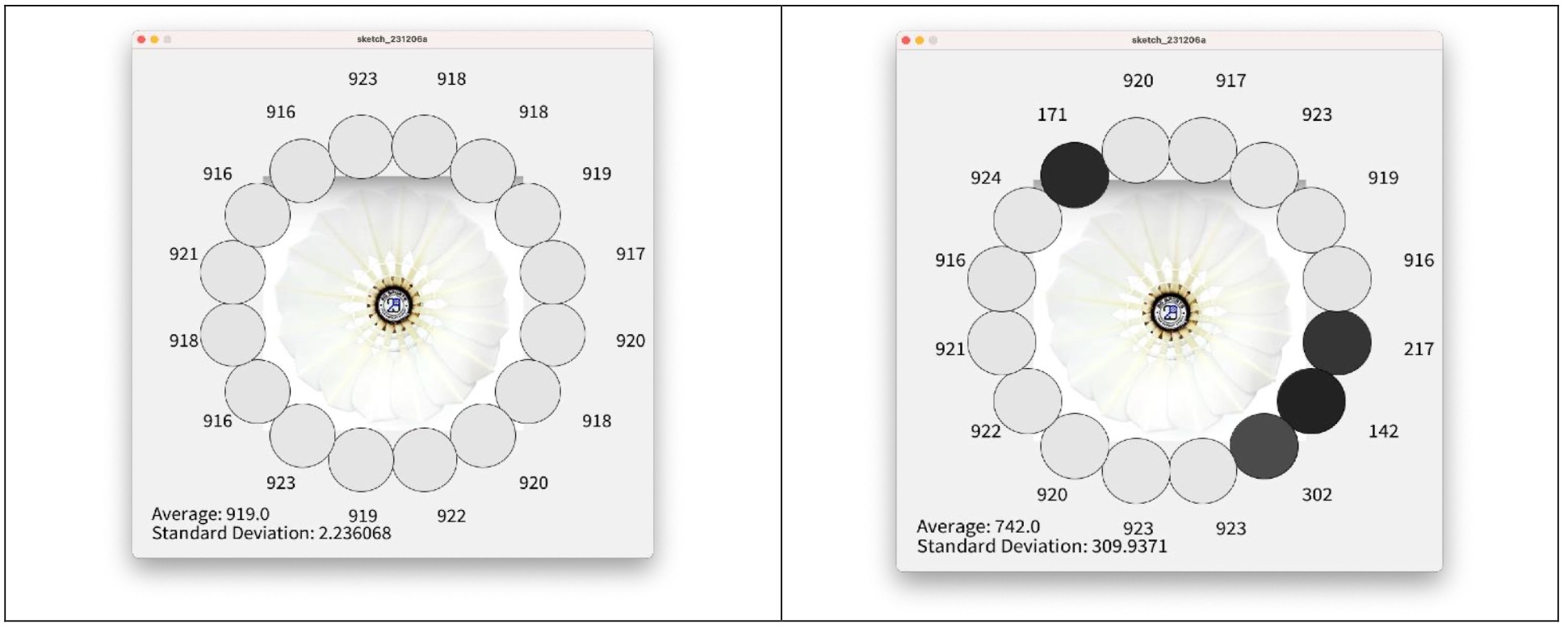
Fig 2. Data visualization of light transmission for feather integrity evaluation.
5. Tech Stack & Fabrication
- SolidWorks (CAD & Mechanism Design)
- Arduino / C++ (Sensor integration & Motor control)
- 3D Printing & Aluminum Profile Assembly
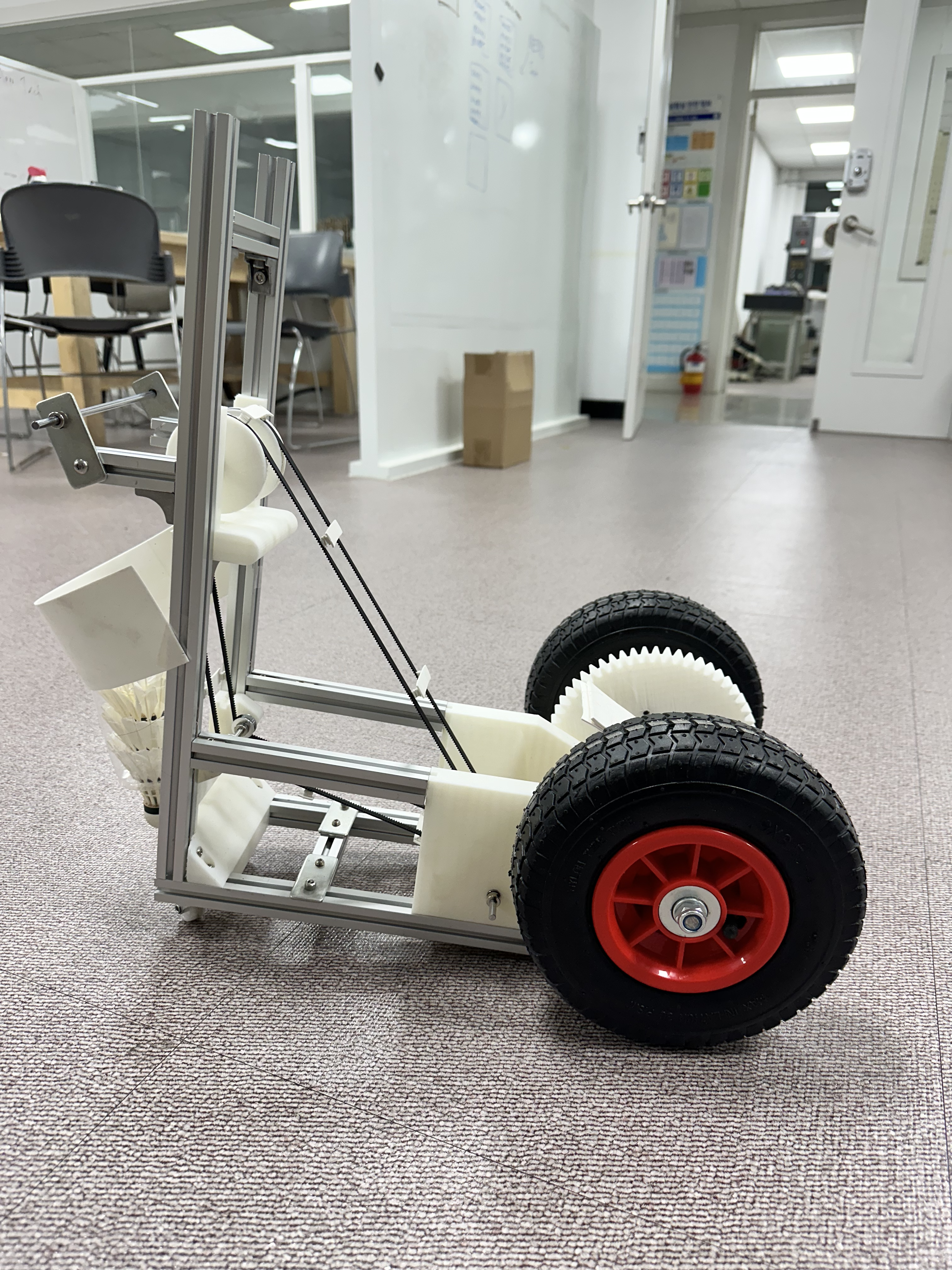
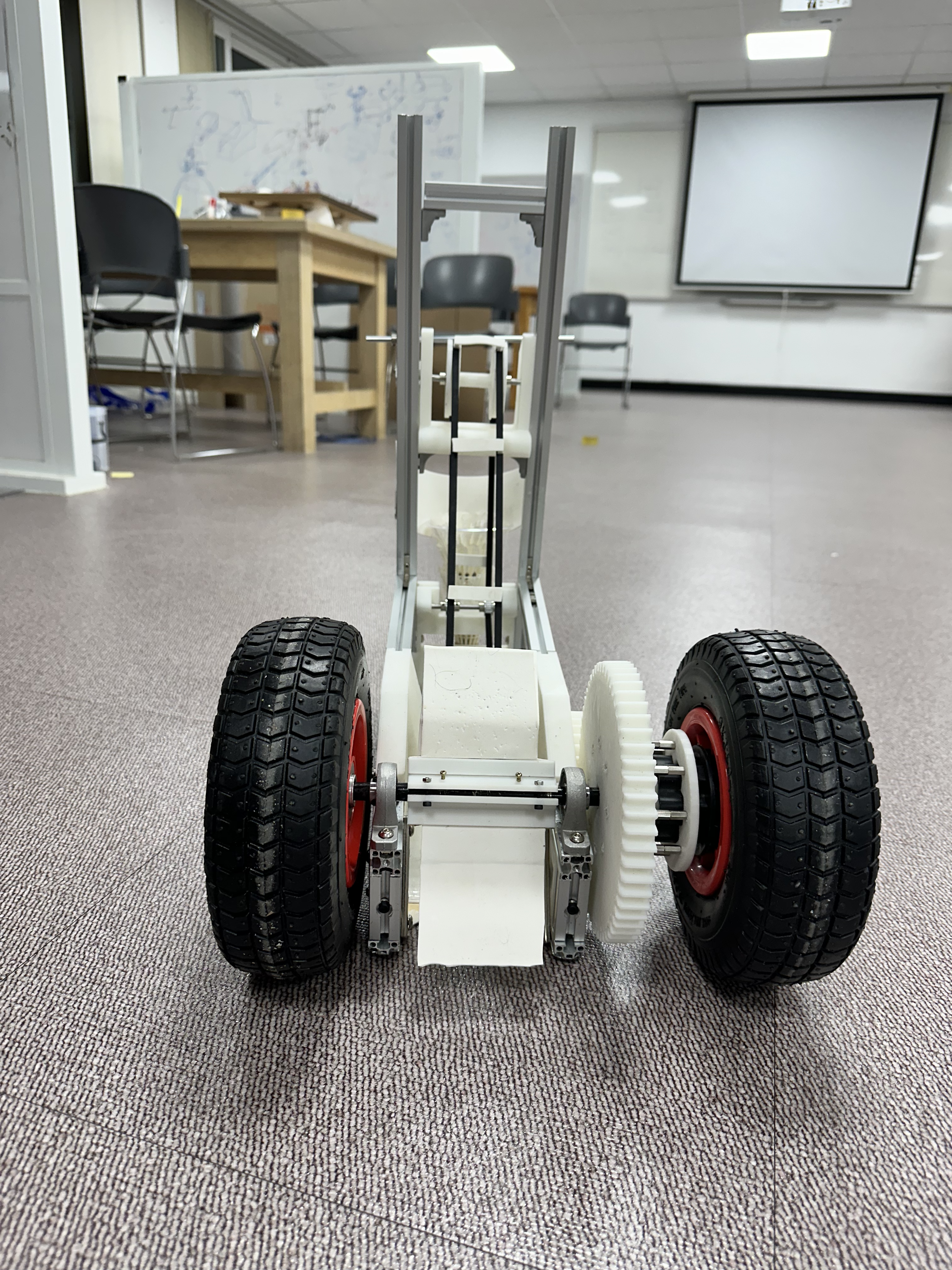
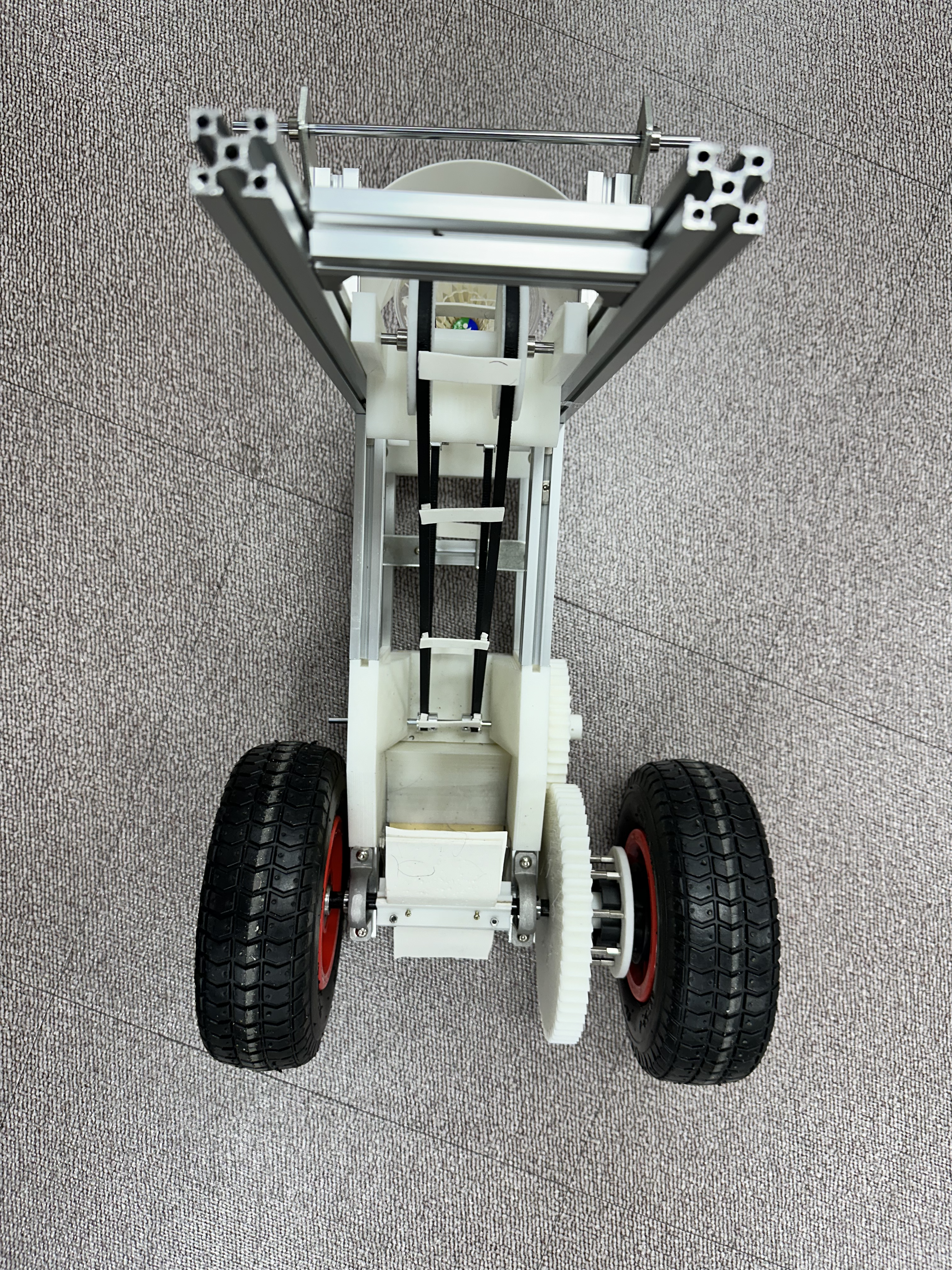
Fig 3. 3D-printed and fully assembled prototype from various angles.
6. Validation
Conducted extensive A/B testing, focus group interviews, and competitive analysis against existing commercial products, demonstrating superior cost-effectiveness and user convenience.
Fig 4. Performance validation videos showing the shuttlecock sweeping and lifting process.